The calibration points are now even more helpful in sorting out the telescope mechanical characteristics.
-
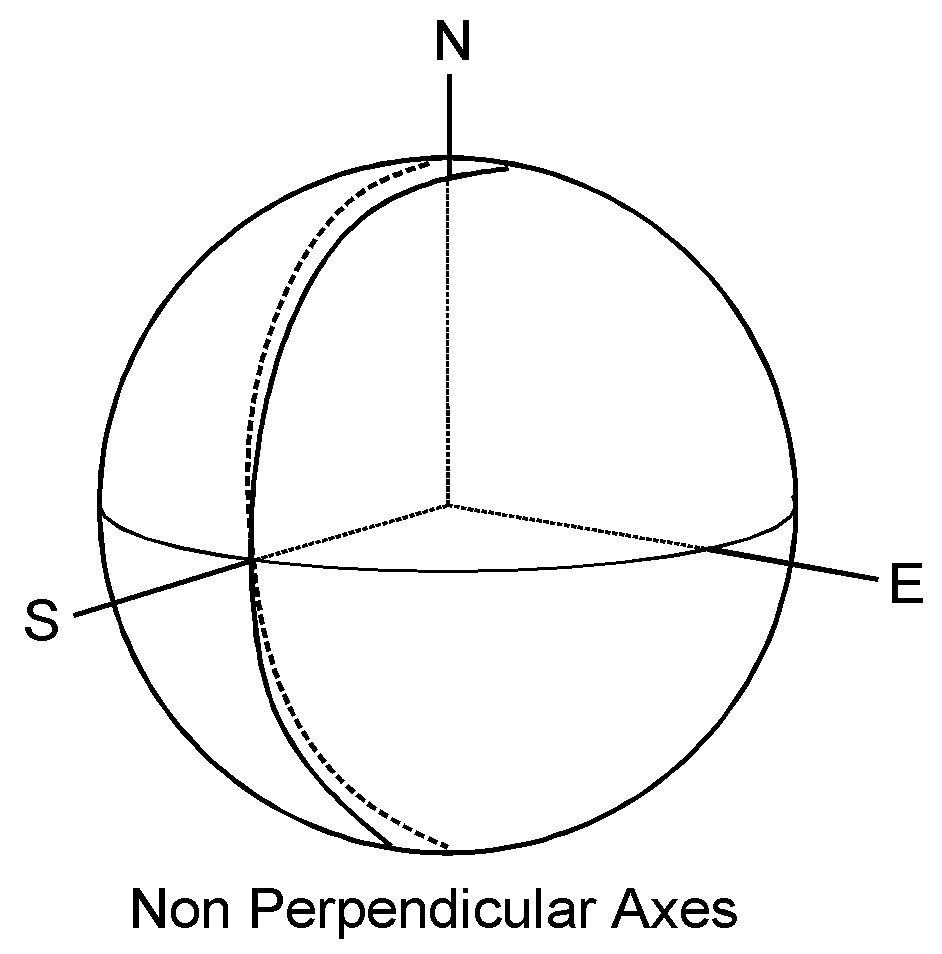
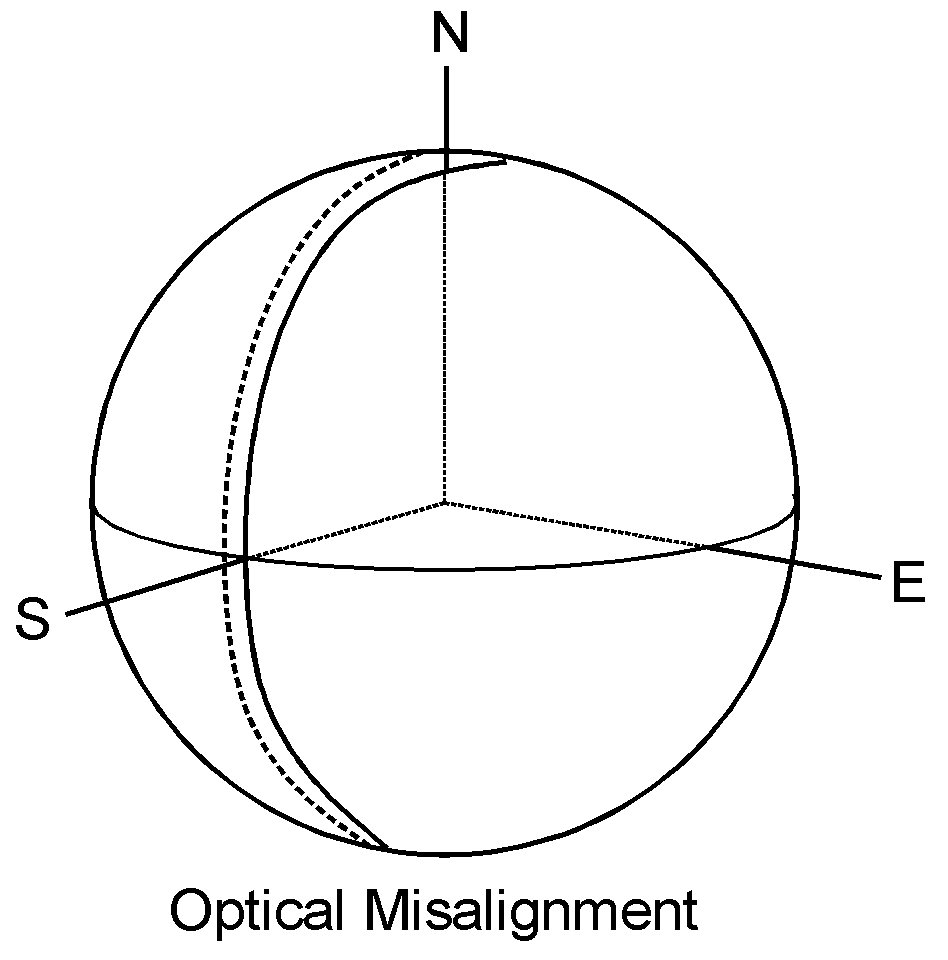
CAL3 - If you have a GEM or FORK type where the tube can be reversed over the pole at the central meridian then it is possible to get an idea of optical misalignment and non-orthogonality between RA and DEC axes. So the procedure is to select a variety of stars near the central meridian at different declinations, Centre one of them, press CAL1 then do MREV centre it again then do CAL3. The display will give you an RA difference in degrees. Optical misalignment gives you a constant error independant of the declination and non-orthogonality gives you a varying error depending on Declination. The two diagrams show how the DEC axis moves with either of these errors present.
-
CAL2 - Result can now be USED or WIPED. If you use the results then corrections will be calculated every ten seconds on BOTH axes to drive the telescope to follow the star, even though the polar alignment may be out and the star normally drifts. It will now not drift, but tracks. An extra function, UNCAL, stops this process from happening (and RECAL to include it again). At installation it may be necessary to press UNCAL before the first CAL1 to avoid unpredictable results.
If you have OPTICAL MIS-ALIGNMENT error you can shim the tube rings to minimise this error. Do this close to DEC = 0 degrees as the Non-Perpendicular error is zero at this point and use the CAL3 procedure to determine the amount. NonPerp error can only be sorted by calibration. TPOINT can compensate for these errors now.
|
|
